Singular Value Decomposition - Eigenvalue
matrix , updated 2021-11-18
In the last post, I described matrix as a transformation mapped onto one or multiple vectors. In this sequel, we continue building the foundation that leads to Singular Value Decomposition.
Eigenvalues and Eigenvectors ¶
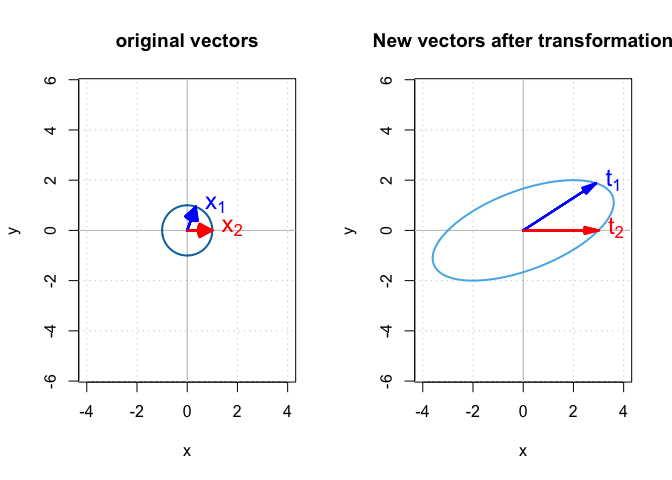
A vector is an entity which has both magnitude and direction. The general effect of matrix $\mathbf{A}$ on a vector in $\mathbb{X}$ is a combination of stretching and rotation. For example, in Figure 1, matrix $\mathbf{A}$ changed both direction and magnitude of vector $\mathbf{x}_1$, which resulted in the transformed vector $\mathbf{t}_1$. However, for vector $\mathbf{x}_2$, only its magnitude changed after transformation. $\mathbf{x}_2$ and $\mathbf{t}_2$ have the same direction. Matrix $\mathbf{A}$ only stretched $\mathbf{x}_2$ in the same direction and returned vector $\mathbf{t}_2$ which has a bigger magnitude.
The only way to change the magnitude of a vector without changing its direction is by multiplying it with a scalar. For example, we have a vector $\mathbf{u}$ and a scalar quantity $\lambda$, then $\lambda\mathbf{u}$ has the same direction and a different magnitude as $\mathbf{u}$. For a vector like $\mathbf{x}_2$ in Figure 1, the effect of multiplying by $\mathbf{A}$ is like multiplying it with a scalar quantity $\lambda$.
$$ \mathbf{t}_2 = \mathbf{A}\mathbf{x}_2 = \lambda\mathbf{x}_2 $$
This is not universally true for all vectors in $\mathbb{X}$. In fact, for a given matrix $\mathbf{A}$, only some vectors in $\mathbb{X}$ have this property. These special vectors are called the eigenvectors of matrix $\mathbf{A}$ and their corresponding scalar quantity $\lambda$ is called an eigenvalue of matrix $\mathbf{A}$ for that eigenvector. The eigenvector of an $n \times n$ matrix $\mathbf{A}$ is defined as a nonzero vector $\mathbf{u}$ such that:
$$ \mathbf{A}\mathbf{u} = \lambda\mathbf{u} $$
where $\lambda$ is a scalar and is called the eigenvalue of $\mathbf{A}$, and $\mathbf{u}$ is the eigenvector corresponding to $\lambda$. In addition, if you have any other vectors in the form of $a\mathbf{u}$ where $a$ is a scalar, then by placing it in the previous equation we get: $$ \mathbf{A}(a\mathbf{u}) = a\mathbf{A}\mathbf{u} = a\lambda\mathbf{u} = \lambda(a\mathbf{u}) $$
which means that any vector which has the same direction as the eigenvector $\mathbf{u}$ (or the opposite direction if $a$ is negative) is also an eigenvector with the same corresponding eigenvalue. For example, the eigenvalues of $$ \mathbf{B} = \begin{bmatrix} -1 & 1 \\ 0 & -2 \\ \end{bmatrix} $$ are $\lambda_1 = -1$ and $\lambda_2 = -2$ and their corresponding eigenvectors are:
$$ \mathbf{u}_1 = \begin{bmatrix} 1 \\ 0 \\ \end{bmatrix} $$
$$ \mathbf{u}_2 = \begin{bmatrix} -1 \\ 1 \\ \end{bmatrix} $$
and we have:
$$ \begin{align} \mathbf{B}{\mathbf{u}}_1 = \lambda_1{\mathbf{u}}_1 \\ \mathbf{B}{\mathbf{u}}_2 = \lambda_2{\mathbf{u}}_2 \end{align} $$
This means that when we apply matrix $\mathbf{B}$ to all the possible vectors, it does not change the direction of two vectors — $\mathbf{u}_1$ and $\mathbf{u}_2$ (or any vectors which have the same or opposite direction) — but only stretches them. For eigenvectors, matrix multiplication turns into a simple scalar multiplication.
Next, we calculate eigenvalues and eigenvectors of $\mathbf{B}$ using R.
# target matrix
mat_b <- matrix(c(-1, 0, 1, -2), 2)
# calculate eigenvalues and eigenvectors for `mat_b`
eigen_b <- eigen(mat_b)
eigen_b
eigen() decomposition
$values
[1] -2 -1
$vectors
[,1] [,2]
[1,] -0.7071068 1
[2,] 0.7071068 0
We used function eigen() from base R to calculate the eigenvalues and eigenvectors.
It returned a list.
The first element of this list is a vector that stores the eigenvalues.
The second element is a matrix that stores the corresponding eigenvectors.
Note that the eigenvector for ${\lambda}_2 = -1$ is the same as ${\mathbf{u}}_2$,
$$ \begin{bmatrix} 1 \\ 0 \\ \end{bmatrix} $$
but the eigenvector for ${\lambda}_1 = -2$ is different from ${\mathbf{u}}_1$.
That is because eigen() returns the normalized eigenvector.
A normalized vector is a unit vector whose magnitude is 1.
Before explaining how to calculate the magnitude of a vector,
we need to learn the transpose of a matrix and the dot product,
which will be the topic of my
next post.